三菱PLC伺服实例程序分析应用
文章分享:三菱PLC伺服实例程序分析应用。
1.原点回归程序示例:

M1250 原点回归启动按键 Y50 定位启动 (私服参数) Y44 轴停止 (私服参数)
Y40 PLC准备完成 (私服参数)
M1081 电机手动状态
M6401 原点回归启动条件输出脉冲
[T0 H4 K1500 K9001 K1] 原点回归专用指令
T0 Plc>》》QD75
H4 QD75模块的首地址分配位置 40 K1500 定位指令 (私服参数) K9001 机械原点回归
K1 设定值
SET Y50 执行电机的输出,需要进行职位处理
2.原点回归(进行中到完成)程序示例:

Y50 原点回归动作进行中(私服电机的定位启动输出)
X50 启动完成信号(私服参数)
X4C 电机BUSY(忙轴)电机动作中处于忙轴中X4C接通
M6501 原点回归动作完成输出(采用维持处理,一直接通)
断开条件:
M6701 电机发生SERVO ERROR
X48 接通(私服内部参数,报警输出)
YA42 私服电机的M/C电源断开
[ RST Y50] 当电机完成原点回归后,直接对电机进行复位
M1251 原点回归动作进行状态指示灯 当原点回归正在进行中时以间隔0.5S的时间闪烁 原点回归完成后一直接通
3.全部原点回归程序示例:

M1290 原点回归的启动开关
M1001 原点回归时必须在手动状态下进行
M100 原点回归的输出 (动作需要进行维持处理)
原点回归的断开条件:
M101 全部原点回归执行完成
M1012 复位按键启动
M105 紧急停止开关启动
4.JOG SPEED的更改和专用指令写法:
M1055 M1053 M1051 是速度选择的几个按键开关,可以通过TOUCH直接进 行设定选择 
SM400一直处于接通状态,表示JOG的速度选择可以通过开关的任意时间进 行设定写入从而改变。
D120 是速度值存储的字地址
DMOV 传送指令,D 32数据传送指令 (速度的值是任意设定的)
[ DTO H4 K1518 D120 K1 ] JOG速度专用指令写入方法
6.SERVO ERROR的复位专用指令和写法

伺服ERROR故障复位专用指令和写法
![]()
K1502 K1602 K1702 K1802 是对各个轴出错复位的专用代码
当轴发生出错时,相对应得轴会自动接通出错信号,依次是轴一 x48
轴二X49 轴三x4a 轴四X4B
当故障解决后,需要对QD75的报警进行复位处理,需要在程序中编写一个 复位开关,当开关接通后,执行私服复位的专用指令,将故障消除。
7.SERVO 电机运行的当前数据读取专用指令和写法

伺服电机当前数据读取的专用指令和写法
DFRO 是 DFROM的简写模式 32位数据的读取,当前数据可能大于16位
K800 K900 K1000 K1100 分别是轴一到轴四的伺服电机当前数据读取的 专用代码
D6400 D6404 D6402 D6406 是数据读取都得存储地址
5.SERVO ERROR的读取专用指令和写法
![]()
私服内部专用指令(故障读取)

PLC CPU 从 QD75中将故障的信息读取出来 用 FROM
将读取的故障信息数据存储在D6700l里
8.SERVO 电机内部I/O信息数据读取专用指令和写法


9.SERVO 定位输出专用指令和写法(经典)

10.伺服电机加速时间和减速时间的程序设定方法:

通过M81的接通和断开,来选择电机在正向运行时的加减速,如果只通过 对伺服参数的直接设定,那么电机的正向运行和反向运行时的加减速一样。

11.伺服电机在运行中的速度改变程序写法示例1:



11.伺服电机在运行中的速度改变程序写法示例2:

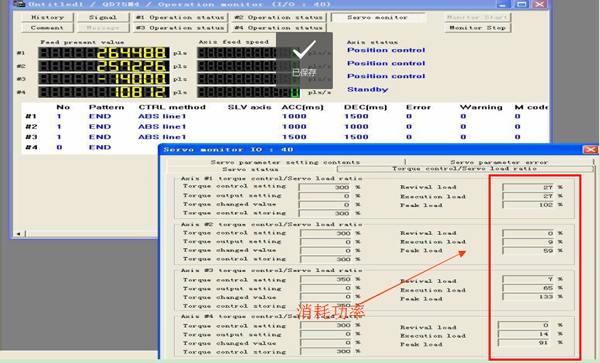
12.PLC怎样读取伺服电机的功率消耗数据,程序写法:
读取的数据存储地址


深圳市海蓝机电设备有限公司(www.szhailan.com)专业经营:三菱PLC、三菱伺服电机、三菱变频器、三菱触摸屏等工控自动化产品的批发和代理。同时提供机器人视觉、自动化开发、上位机软件、机电设备维修等技术服务。
电话:0755-88356296(10线) 吴经理:13823726967






评论信息